HAPPO¶
概述¶
HAPPO (Heterogeneous-Agent Proximal Policy Optimisation) 是在论文 Trust Region Policy Optimisation in Multi-Agent Reinforcement Learning 中提出的,一种基于信任区域方法 (trust region methods) 的多智能体强化学习算法。 在传统的单智能体强化学习中,信任区域方法被广泛应用,能够保证学习到的策略逐渐改善,从而在各种任务中取得卓越性能。 然而,在多智能体强化学习中,由于各个智能体的策略更新可能存在冲突,传统的单智能体信任区域方法无法简单地应用于协作场景。
HAPPO 算法基于单智能体上的 TRPO 和 PPO 算法 Proximal policy optimization algorithms ,针对多智能体协作场景中的信任区域学习进行了扩展和优化,基于论文中的多智能体优势分解引理 (multi-agent advantage decomposition lemma),提出了多智能体的顺序策略更新方案 (sequential policy update scheme)。 进而构建了针对多智能体的trust region算法:HATRPO (Heterogenous-Agent Trust Region Policy Optimisation) 和 HAPPO (Heterogeneous-Agent Proximal Policy Optimisation)
核心要点¶
HAPPO 采用了 信任域方法,但不需要智能体共享参数,并且不对联合价值函数的分解性做出任何限制性假设 。
HAPPO 是一种 无模型(model-free)、基于策略(policy-based)、同策略(on-policy) 的多智能体强化学习方法。
HAPPO 支持 离散(discrete)和连续(continuous) 的动作空间。
HAPPO 考虑了 部分可观察(partially observable) 的情景,其中每个智能体的 Actor 网络只获得个体观察。
HAPPO 的神经网络模型中可以使用 RNN 。
关键方程或关键图形¶
多智能体场景下,对于任意有序的智能体子集 \(i_{1:m}=\left( i_1,...,i_m \right)\) 的状态动作值函数定义为:
其中 \(-i_{1:m}\) 表示 \(i_{1:m}\) 的补集,简单来说,这个函数表示如果智能体 \(i_{1:m}\) 在状态 \(s\) 下采取联合行动 \(\mathbf{a}^{i_{1:m}}\) ,平均回报是多少。 在此基础上,定义多智能体优势函数 (Multi-agent Advantage Function) 如下:
该函数将智能体 \(i_{1:m}\) 的联合动作 \(\mathbf{a}^{i_{1:m}}\) 和智能体 \(i_{1:k}\) 的联合动作 \(\mathbf{a}^{i_{1:k}}\) 的平均价值进行比较。 根据 Multi-Agent Advantage Decomposition Lemma,对于任何有序智能体的子集 \(i_{1:m}\) :
如果每个智能体 \({i_j}\) 都知道智能体 \(i_{1:j-1}\) 做什么,那么它便可以做出动作 \(a^{i_j}_{*}\) ,以最大化自己的multi-agent advantage(其最大值始终为正)。
由于 HAPPO 的近似多智能体信任域目标涉及旧的策略 \({\pi}^{i_m}\) 和候选的策略 \(\hat{\pi}^{i_m}\) ,还涉及多个智能体 \(i_{1:m-1}\) 刚更新的联合策略。 所以使用重要性抽样(importance sampling),智能体 \(i_{1:m-1}\) 已经进行了更新,智能体 \(i_{m}\) 则计算如下 ratio:
所以对于来自旧的联合策略 \(\mathbf\pi^{1:m-1}\) 的数据,计算上述 ratio 即可用于当前策略的训练。
PPO 对 TRPO 做了简化运算;HAPPO 基于同样的道理对 HATRPO 的中二阶微分的编码和计算进行简化,而使用一阶导数。HATRPO 相关由于受约束的HATRPO目标与TRPO具有相同的代数形式,因此可以使用 clip 目标来实现。
其中 \(\frac{\hat{\pi}^{i_m}(a^{i_m}|s)}{{\pi}^{i_m}(a^{i_m}|s)}\) 和 PPO 类似,为智能体 \(i_{m}\) 新旧策略 ratio; 而 \(M_{\mathbf \pi}(s,\mathbf{a})=\frac {\bar {\mathbf \pi }^{i_{1:m-1}}(\mathbf{a}^{i_{1:m-1}}|s)}{\mathbf{\pi}^{i_{1:m-1}}(\mathbf{a}^{i_{1:m-1}}|s)} \cdot A_{\mathbf{\pi}}(s,\mathbf{a})\) , 其中 \(A_{\mathbf{\pi}}(s,\mathbf{a})\) 是联合优势函数, \(\frac{\bar {\mathbf \pi }^{i_{1:m-1}}(\mathbf{a}^{i_{1:m-1}}|s)}{\mathbf{\pi}^{i_{1:m-1}}(\mathbf{a}^{i_{1:m-1}}|s)}\) 为智能体 \(i_{1:m-1}\) 新旧联合策略的 ratio。
这样可以确保进行小步幅地策略更新。clip目标对于策略参数是可微的,所以我们所要做的就是初始化 \(\theta^{i_m}=\theta_{old}^{i_m}\) ,并多次进行更新。
其他关于 PPO 的细节可见 PPO 文档 。
算法伪代码¶

HAPPO 也可以选择在模型中加入 RNN 。
实现¶
算法的默认设置如下:
HAPPO 使用的网络接口定义如下,其中包含了 n_agent 个的 model:
而单个智能体的 model 与 PPO 的类似:
Benchmark¶
environment |
best mean reward |
evaluation results |
config link |
comparison |
|---|---|---|---|---|
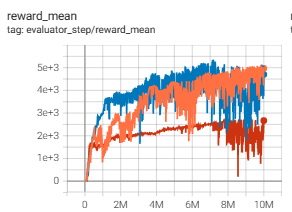
Halfcheetah (Halfcheetah-v2) |
5356 |
|
||
Simple-spread (simple_spread_v2) |
-136.8 |

|
引用¶
Kuba, Jakub Grudzien, et al. “Trust region policy optimisation in multi-agent reinforcement learning.” arXiv preprint arXiv:2109.11251 (2021).
Schulman, John, et al. “Proximal policy optimization algorithms.” arXiv preprint arXiv:1707.06347 (2017).
其他开源实现¶
TRPO-in-MARL