PettingZoo¶
概述¶
PettingZoo 是一个用于研究多智能体强化学习的 Python 库,可以认为是多智能体版本的 Gym。它包含以下几个环境家族:
Atari:多人 Atari 2600 游戏,包括合作、竞争以及混合等场景
Butterfly:PettingZoo 团队自己开发的需要高度协调的合作性图形游戏
Classic:经典游戏,包括纸牌、棋盘游戏等
MAgent:可配置的,具有大量数量粒子智能体的环境,源于 https://github.com/geek-ai/MAgent
MPE:一组简单的非图形通信任务,源于 https://github.com/openai/multiagent-particle-envs
SISL:3 个合作环境,源于 https://github.com/sisl/MADRL
下图所示为其中的 mpe_simple_spread 环境:
备注
需要注意的是,PettingZoo 出于可重复的考虑,保持严格的版本管理。所有环境都以_v0 这样的后缀结尾。当环境发生变化而可能影响学习结果时,数字会增加一个(例如_v0->_v1),以防止潜在的混淆。
安装¶
安装方法¶
目前 PettingZoo 官方支持 Linux 和 macOS 上的 Python 3.7~3.9。
可以通过 pip 直接安装;此外,由于 DI-engine 中有单元测试用到了 PettingZoo,因此安装 DI-engine 也会默认安装 PettingZoo:
# Method1: Install directly with pip
pip install pettingzoo
# Method2: Just install DI-engine
pip install DI-engine
由于 PettingZoo 所包含的环境非常多,不同的环境在不同的系统上安装情况也各不相同。因此以上的安装并没有包含所有环境家族的所有依赖。对于特定的环境家族依赖,你可以这样安装:
# install Atari family dependency
pip install pettingzoo[atari]
# or install all dependencies
pip install pettingzoo[all]
验证安装¶
安装完成后,运行如下 Python 程序,如果没有报错则证明安装成功。
from pettingzoo.mpe import simple_spread_v2
env = simple_spread_v2.parallel_env()
obs = env.reset()
print(obs[env.agents[0]]) # (18,)
镜像¶
DI-engine 准备好了配备有框架本身和 PettingZoo 环境的镜像,可通过 docker pull opendilab/ding:nightly 获取,或访问 docker
hub 获取更多镜像
变换前的空间(原始环境)¶
由于 PettingZoo 包含很多环境家族,每个的情况各不相同,难以顾全所有内容。这里以 MPE 中的 Simple Spread 环境为例进行说明。
备注
Simple Spread 的游戏目标是希望智能体覆盖所有的地标的同时,避免彼此之间发生碰撞。
观察空间¶
智能体的观测由
当前智能体的速度,self.vel, (2,)
当前智能体的位置,self.pos, (2,)
地标的相对位置,landmark_rel_positions, (n_landmarks * 2,)
其他智能体的相对位置,other_agent_rel_positions, ((n_agents-1) * 2,)
其他智能体与当前智能体的通信,communication, ((n_agents-1) * 2,)
组成,具体维度为 (2 + 2 + n_landmarks*2 + (n_agents-1)*2 + (n_agents-1)*2),数据类型为 float32。 例如,当你生成一个具有 5 个智能体(n_agents=5)与 5 个地标(n_landmarks=5)的 simple spread 环境时,每个智能体的观测维度为 (30,)。
动作空间¶
无法手动控制
离散动作空间:每个智能体的动作空间相同,大小为
(5,),数据类型为gym.spaces.Discrete(5)。每个具体动作的维度为(,),数据类型为int,具体含义是什么都不做或向四个基本方向进行移动。连续动作空间:每个智能体的动作空间相同,数据类型为
gym.spaces.Box(0.0, 1.0, (5,))。每个具体动作的维度为(5,),数据类型为array,具体含义是什么都不做或向四个基本方向的每个方向上输入 0.0 到 1.0 之间的速度,且相反方向的速度可以叠加。
from pettingzoo.mpe import simple_spread_v2
# discrete env
dis_env = simple_spread_v2.parallel_env(N=3, continuous_actions=False)
# continuous env
con_env = simple_spread_v2.parallel_env(N=3, continuous_actions=True)
dis_env.reset()
con_env.reset()
dis_env.action_space('agent_0').sample() # 2
con_env.action_space('agent_0').sample() # array([0.24120373, 0.83279127, 0.4586939 , 0.4208583 , 0.97381055], dtype=float32)
提示
注意这里我们使用的是 parallel_env() 来生成环境,该函数与普通的 env() 区别在于,在 paralle_env 环境下,所有 agent 的动作同时输入;相反,在 env 环境下,每个 agent 的动作是依次输入的。由于 paralle_env 更为方便,所以我们更为推崇,在DI-engine 封装的环境中,我们也是这么做的。
奖励空间¶
所有的智能体贡献一个全局奖励,依据距离每个地标的最近的智能体来判定,一个
float数值具体而言,所有的智能体都根据最近的智能体离每个地标的距离(最小距离的总和)来获得全局奖励。此外,如果智能体与其它智能体发生碰撞,他们将受到惩罚。
其他¶
游戏在执行完环境参数
max_cycles所指定的周期数后就会终止。所有环境的默认值是 25 个周期。
关键事实¶
输入为 state 而非 raw pixel;
既可以选择离散动作空间,也可以选择连续动作空间;
既有合作 (cooperation) 环境,例如
Simple Spread、Simple Speaker Listener等;也有竞争 (competitive) 环境,例如Simple Adversary、Simple Crypto等。
变换后的空间(RL 环境)¶
观察空间¶
针对多智能体算法,根据变换前的 state,分别生成了局部的 agent_state 和全局的 global_state:
agent_state: shape: (n_agent, 2 + 2 + n_landmark * 2 + (n_agent - 1) * 2 + (n_agent - 1) * 2)
智能体自己的状态:速度、坐标
其他智能体与地标的相对位置
来自其他智能体的通信
global_state: shape: (n_agent * (2 + 2) + n_landmark * 2 + n_agent * (n_agent - 1) * 2, )
所有智能体的状态:速度、坐标
所有地标的位置
所有智能体之间的通信
如果环境参数
action_specific_global_state=True,则每个智能体的 global_state 均不相同,由自己的 agent_state 和原 global_state 进行 concatenate 得到。
动作空间¶
离散动作空间无变换
连续动作空间,若环境变量
act_scale=True,则对动作值进行 affine 变换
奖励空间¶
无变化,为
gym.spaces.Box(low=float("-inf"), high=float("inf"), shape=(1, ), dtype=np.float32)
其他¶
惰性初始化¶
为了便于支持环境向量化等并行操作,环境实例一般实现惰性初始化,即__init__方法不初始化真正的原始环境实例,只是设置相关参数和配置值,在第一次调用reset方法时初始化具体的原始环境实例。
随机种子¶
环境中有两部分随机种子需要设置,一是原始环境的随机种子,二是各种环境变换使用到的随机库的随机种子(例如
random,np.random)对于环境调用者,只需通过环境的
seed方法进行设置这两个种子,无需关心具体实现细节环境内部的具体实现:对于原始环境的种子,在调用环境的
reset方法内部,具体的原始环境reset之前设置环境内部的具体实现:对于随机库种子,则在环境的
seed方法中直接设置该值
训练和测试环境的区别¶
训练环境使用动态随机种子,即每个 episode 的随机种子都不同,都是由一个随机数发生器产生,但这个随机数发生器的种子是通过环境的
seed方法固定的;测试环境使用静态随机种子,即每个 episode 的随机种子相同,通过seed方法指定。
DI-zoo 可运行代码示例¶
完整的训练配置文件在 github link
内,对于具体的配置文件,例如ptz_simple_spread_mappo_config.py,使用如下的 demo 即可运行:
from easydict import EasyDict
n_agent = 3
n_landmark = n_agent
collector_env_num = 8
evaluator_env_num = 8
main_config = dict(
exp_name='ptz_simple_spread_mappo_seed0',
env=dict(
env_family='mpe',
env_id='simple_spread_v2',
n_agent=n_agent,
n_landmark=n_landmark,
max_cycles=25,
agent_obs_only=False,
agent_specific_global_state=True,
continuous_actions=False,
collector_env_num=collector_env_num,
evaluator_env_num=evaluator_env_num,
n_evaluator_episode=evaluator_env_num,
stop_value=0,
),
policy=dict(
cuda=True,
multi_agent=True,
action_space='discrete',
model=dict(
action_space='discrete',
agent_num=n_agent,
agent_obs_shape=2 + 2 + n_landmark * 2 + (n_agent - 1) * 2 + (n_agent - 1) * 2,
global_obs_shape=2 + 2 + n_landmark * 2 + (n_agent - 1) * 2 + (n_agent - 1) * 2 + n_agent * (2 + 2) +
n_landmark * 2 + n_agent * (n_agent - 1) * 2,
action_shape=5,
),
learn=dict(
multi_gpu=False,
epoch_per_collect=5,
batch_size=3200,
learning_rate=5e-4,
# ==============================================================
# The following configs is algorithm-specific
# ==============================================================
# (float) The loss weight of value network, policy network weight is set to 1
value_weight=0.5,
# (float) The loss weight of entropy regularization, policy network weight is set to 1
entropy_weight=0.01,
# (float) PPO clip ratio, defaults to 0.2
clip_ratio=0.2,
# (bool) Whether to use advantage norm in a whole training batch
adv_norm=False,
value_norm=True,
ppo_param_init=True,
grad_clip_type='clip_norm',
grad_clip_value=10,
ignore_done=False,
),
collect=dict(
n_sample=3200,
unroll_len=1,
env_num=collector_env_num,
),
eval=dict(
env_num=evaluator_env_num,
evaluator=dict(eval_freq=50, ),
),
other=dict(),
),
)
main_config = EasyDict(main_config)
create_config = dict(
env=dict(
import_names=['dizoo.petting_zoo.envs.petting_zoo_simple_spread_env'],
type='petting_zoo',
),
env_manager=dict(type='subprocess'),
policy=dict(type='ppo'),
)
create_config = EasyDict(create_config)
ptz_simple_spread_mappo_config = main_config
ptz_simple_spread_mappo_create_config = create_config
if __name__ == '__main__':
# or you can enter `ding -m serial_onpolicy -c ptz_simple_spread_mappo_config.py -s 0`
from ding.entry import serial_pipeline_onpolicy
serial_pipeline_onpolicy((main_config, create_config), seed=0)
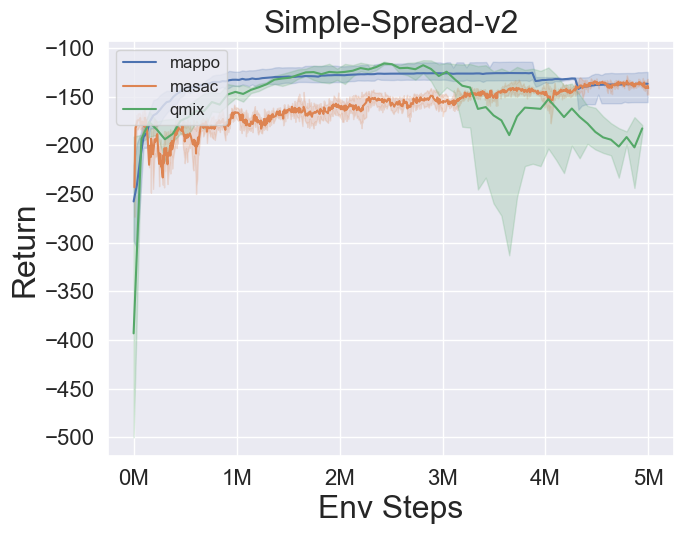
基准算法性能¶
simple_spread_v2
qmix & masac & mappo